Autonomous Satellite Tracker
This page refers to my Autonomous Satellite Tracker article in the March/April 2016 QEX. All updates will be posted here.

|
Supporting Material:
|
|
Images:
|
Notes:
-
Version 2016061704 fixes a problem that prevented entering values in Firefox and Android.
-
Version 2016073023 fixes a problem that prevented downloading elements from AMSAT or
Celestrak in Firefox and Android.
-
Version 2016082822 fixes a problem with refraction near the horizon.
-
I've added a closeup photo of the way I connected the tracker to a tripod. I bought a
small tripod and pulled the center post up through a channel then clamped to it. The
tripod post is 5/8" diameter. ServoCity part numbers: 3x 585548, 1x 585443, 1x 545360
and 2x 585596.
- Notes from a builder, WA7DLG.
- Gregg, W7GRM,
reports
the
HS-7950TH servo
for the
SPT400 platform
is strong enough even for the
Arrow antenna.
|
Update 2018 July 29:
The Tracker is now available using the
ESP8266
processor, the same one used in my
HamClock.
This eliminates the need for the Arduino, ethernet shield and the TP-Link.
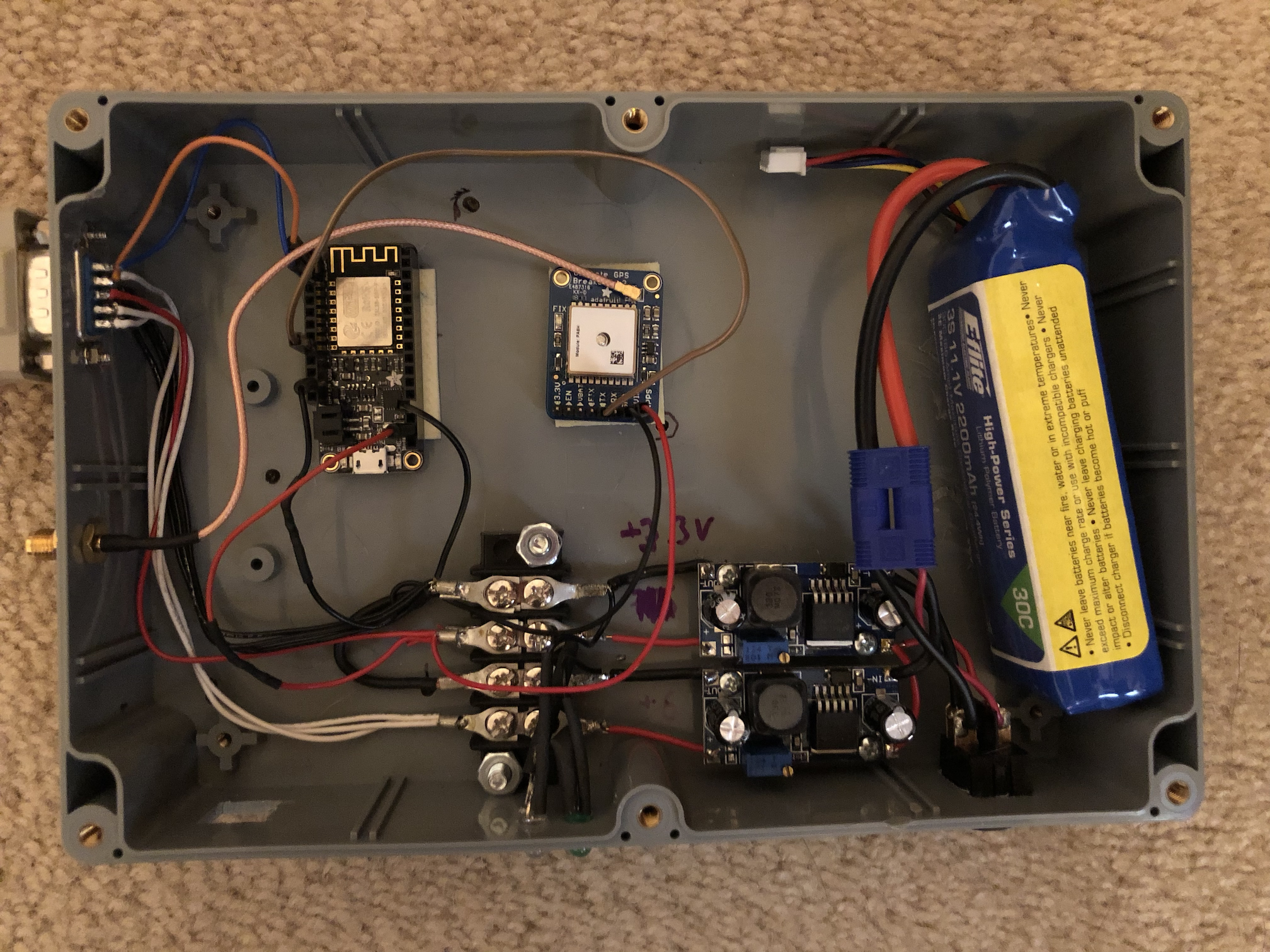
The wiring diagram and interior view are now just this:

The wiring for the Servo controller, 9 DOF Sensor and tilt and pan servos is the same as in my
original design. Note the change from 5 to 3.3 V supply for which the Huzzah EN
is grounded. If you use a 5 V supply then leave EN disconnected.
Update 2023 Apr 21:
Changes:
- updated to 2020 World Magnetic Model
- fixed bug where very low sat pass could cause crazy pass drawing
- fixed bug where mag decl could remain as default after first GPS lock
- use simpler SoftwareSerial constructor for newer ESP8266 board support
- accept unicode characters for SSID and PW
- lookup satellites from same list used by HamClock
The new sketch is dated 2023-05-30 here.
Set up the Arduino IDE for the Adafruit ESP8266 Huzzah the same as described in
FAQ 1 of my HamClock project.
Use the IDE Library manager to also load the following libraries:
- Adafruit BNO055 version 1.5.3
- Adafruit PWM Servo version 2.4.1
- TinyGPS 13.0.0
The Tracker functions the same way as described in the original article except how it connects to the network:
- When the Huzzah powers up it will try to connect to the WiFi access point it last used and
be at the same IP as before.
- If this fails, the Huzzah creates its own open WiFi Access Point called "SatTrack".
- Connect to this AP then surf to http://192.168.10.10.
- You should see a form where you can fill in the credentials for your WiFi and the network details
you want assigned to the Tracker.
- Click Send, wait a few seconds, then turn off the Tracker.
- Connect back to your normal WiFi AP.
- Turn Tracker on, wait a few seconds, then you surf to the Tracker at the IP you specified in the form.
Servo City seems to have discontinued the gimbal I used.
The closest they seem to have now is
this one
which can be connected as shown in the lower diagram to form a pan-tilt platform.
Thomas, DL2TW, has made code changes to add a TFT status display.
I've not tried his changes but you can get his
zip file here if you want to try them.
Kishore, A45WI, is building his own platform using
these monsters
(demo video here).
Update 2025 Aug 12:
Changes:
- updated to 2025 World Magnetic Model
- updated HamClock TLE access
The new sketch is dated 2025-08-12 here.
The IDE is set up the same as for the previous version.
Let me know how it goes for you,
73,
Elwood Downey
,
WBØOEW